-
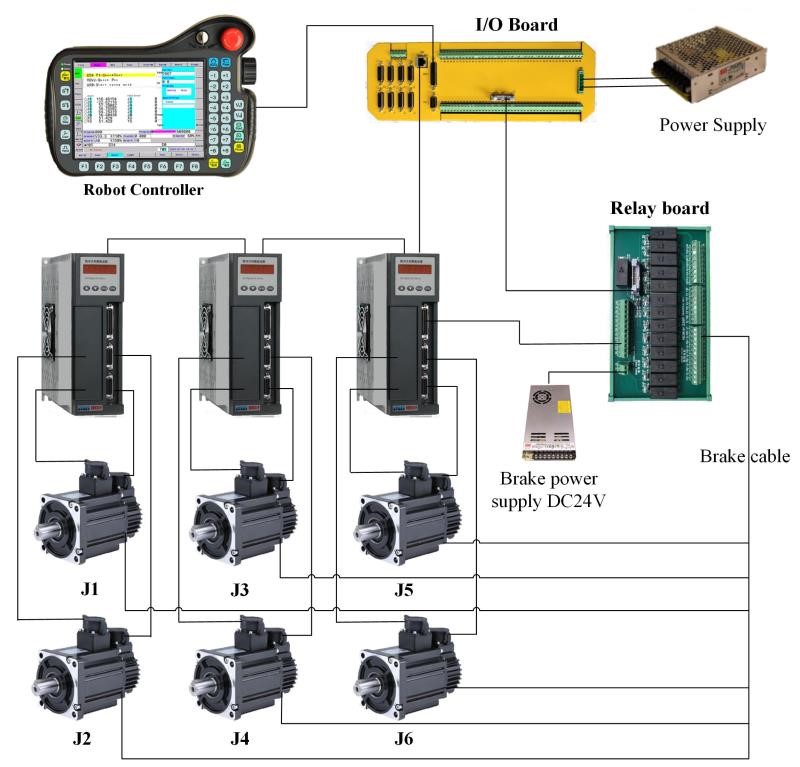
Основний склад промислових роботів
З точки зору архітектури робота можна розділити на три частини та шість систем, з яких три частини: механічна частина (використовується для реалізації різних дій), сенсорна частина (використовується для сприйняття внутрішньої та зовнішньої інформації), контрольна частина (Керуйте роботом для виконання різних ...Читати далі -
Стратегія навичок програмування обробного центру з ЧПУ
Для обробки з ЧПУ дуже важливим є програмування, яке безпосередньо впливає на якість і ефективність обробки. Тож як швидко освоїти навички програмування обробних центрів з ЧПК? Вчимося разом! Команда паузи, G04X(U)_/P_ стосується часу паузи інструмента (зупинка подачі, шпиндель ...Читати далі -

Сім технічних моментів тенденції розвитку верстатів з ЧПК у Китаї.
Аспект 1: Складні верстати знаходяться на стадії зростання. Завдяки потужним можливостям керування високоякісних верстатів з ЧПК, дедалі вдосконаленому дизайну та технології виробництва, а також дедалі зрілішій технології застосування, включаючи програмування, складні верстати з їх потужністю...Читати далі






